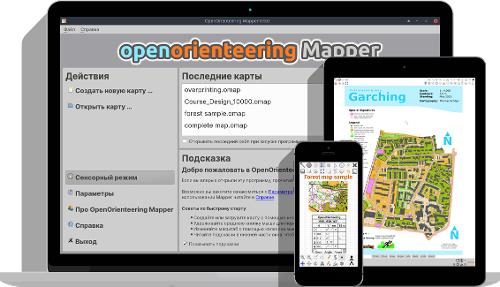
OpenOrienteering Mapper — свободная программа для черчения и печати спортивных и других видов карт. Программа по сути является кроссплатформенной картографической издательской системой с функционалом графического векторного WYSIWYG-редактора и десктопной ГИС.
Программа имеет десктопную (Linux, macOS, Windows) и мобильную (Android, Android-x86) версии. На данный момент использование мобильной версии рекомендуется для начальных этапов картографирования и топосъёмки на местности, а ответственные картографические работы и подготовку к печати рекомендуется выполнять с помощью десктопной версии.
OpenOrienteering Mapper v0.9.0 является первым стабильным релизом ветки 0.9.x с огромным количеством новшеств и изменений, в состав которого включён новый набор условных знаков соответствующий международной спецификации для спортивных карт «IOF ISOM 2017-2».
Основные изменения:
ПРИМЕЧАНИЕ: Список основных изменений представлен относительно предыдущей стабильной версии
v0.8.4. Полный список изменений относительноv0.8.0доступен на GitHub.
- Добавлен набор условных знаков «ISOM 2017-2».
- Форматы файлов:
- Значительно улучшена поддержка формата OCD, включая возможность сохранения до OCDv12 включительно, геопривязку и кастомные иконки символов.
- Поддержка подложек в формате GeoTIFF.
- Добавлена возможность экспорта в разные форматы векторных геоданных (поддерживаемых библиотекой GDAL).
- Инструменты:
- Инструмент «Редактировать объекты» учитывает углы.
- Инструмент «Масштабировать объекты» может (опционально) масштабировать несколько объектов относительно оригинального положения каждого из них независимо друг от друга.
- Android:
- Настраиваемый размер кнопок на панели инструментов.
- Поддержка 64-битной архитектуры.
- Оптимизация фоновых процессов.
- «Сенсорный режим» доступен для десктопной версии:
- Полноэкранное редактирование на устройствах с сенсорным вводом или без наличия клавиатуры (требуется как минимум наличие мышки), как и в мобильной версии для Android.
- Поддержка встроенных GPS-приемников для Windows/macOS/Linux. Стоит отметить что доступ к Windows location API требует наличия .NET Framework 4 и Powershell 2 (входит в поставку Windows 10).
- Значительное обновление сторонних компонентов и зависимостей (Qt 5.12, PROJ 6, GDAL 3), в связи с чем для работы Mapper
v0.9.0требуются более новые версии дистрибутивов Linux.
Кроме того менее заметным, но не менее значимым является начальная стадия процесса интеграция автотестов для macOS, Linux и Windows на базе сервиса Azure Pipelines от Microsoft, что, вместе с использованием Open Build Service для Linux, теперь позволяет создавать все пакеты релизов в автоматическом режиме. Это значительно повысит возможность выпуска регулярных релизов с уверенностью в качестве сборки.
“- Как обычно, выражаю благодарность 14 разработчикам внёсшим свой вклад в разработку этой версии, а также всем тем кто помогал в поиске багов в ночных
devсборках.”/ Kai ‘dg0yt’ Pastor, руководитель проекта «OpenOrienteering» /
В настоящее время набор условных знаков «ISSprOM 2019» находится в разработке, но в данный релиз он пока не включён.
В свете грядущего релиза Mapper v1.0, участники проекта «OpenOrienteering» рассматривают вопрос визуального ребрендинга иконки и логотипа.
- Официальный сайт
- Онлайн-руководство пользователя (оффлайн-версия входит в состав бинарных пакетов)
- Пособие «Orienteering mapping with LiDAR, smartphones and free tools» (Medium)
- Статья в Википедии (uk.Wikipedia)
- Багтрекер (GitHub)
- Вики-документация для разработчиков (GitHub)
- Скачать исходный код и бинарные пакеты для Android, Windows и macOS (GitHub)
- Скачать бинарные пакеты для Linux (OBS)
>>> Подробности