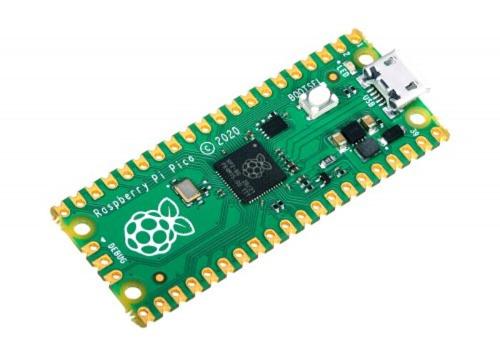
Команда Raspberry Pi выпустила плату на кристалле RP2040 с 40-нм архитектурой: Raspberry Pi Pico.
Спецификация RP2040:
- Двухядерный Arm Cortex-M0+ @ 133МГц
- 264Кб RAM
- Поддержка до 16МбFlash памяти через выделенную шину QSPI
- DMA контроллер
- 30 GPIO пинов, 4 из которых могут быть использованы как аналоговые входы
- 2 UART, 2 SPI и 2 I2C контроллера
- 16 ШИМ каналов
- USB 1.1 контроллер с поддержкой host-режима
- 8 Raspberry Pi I/O (PIO) программируемых конечных автоматов
- Режим USB mass-storage boot с поддержкой прошивки через UF2
Raspberry Pi Pico разработана как оригинальная, недорогая (цена всего 4$) плата для RP2040. Она содержит RP2040 с 2 Мб флэш-памяти и микросхемой блока питания, поддерживающего входное напряжение от 1,8 до 5,5 В. Это позволяет питать Pico от различных источников, включая две или три AA батареи последовательно или от одного литий-ионного аккумулятора.
На базе чипа RP2040 так же скоро будут доступны платы от сторонних производителей:
>>> Подробности
.png)
