Дачная лаборатория
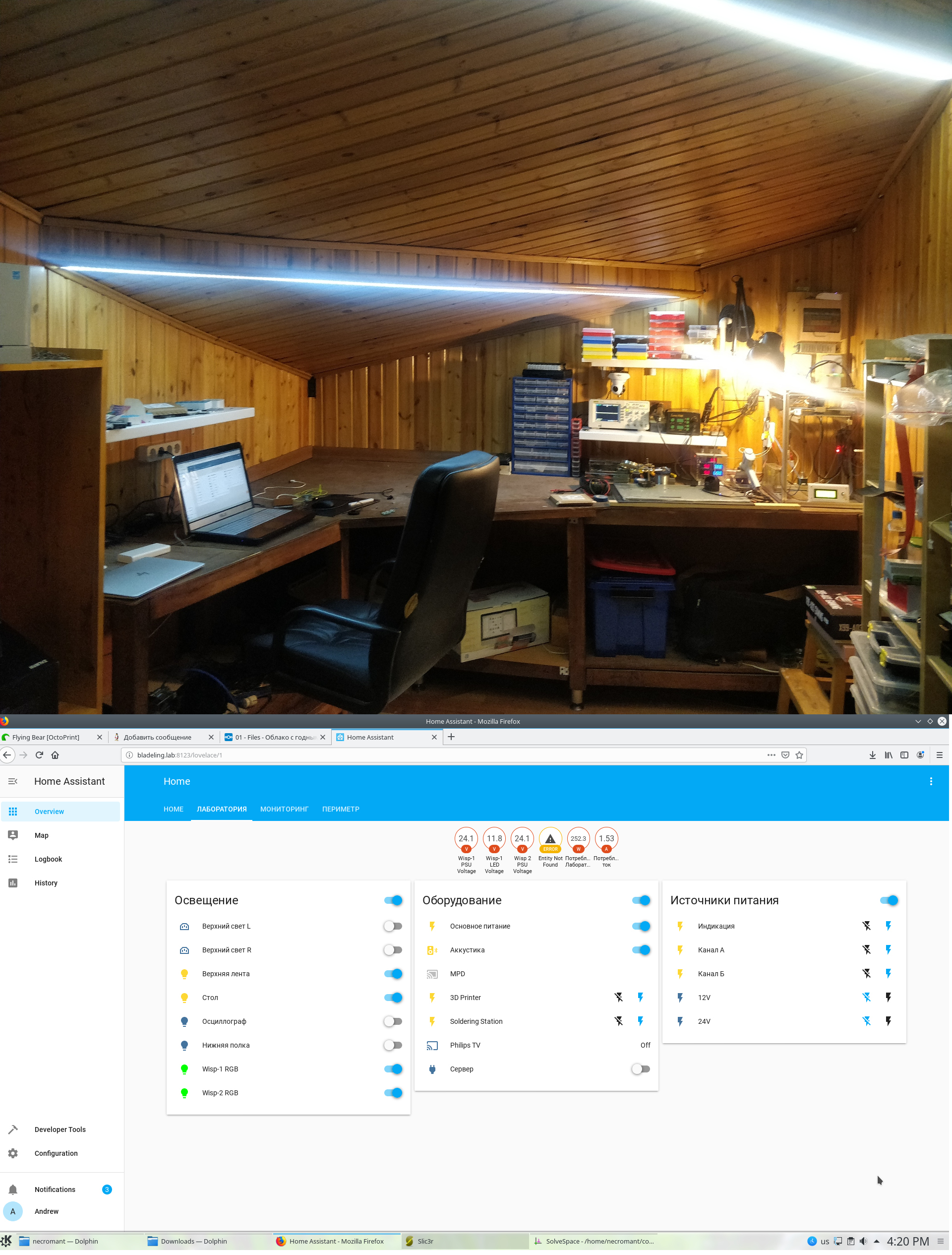
Собственно, пока были новогодние праздники решил заняться самым неблагодарным делом - навести порядок в дачной лаборатории, выкинуть хлам старый. Собственно, на фотографии она и есть. А чуть ниже панель управления этой лабораторией в homeassistant.
Оборудование (основное):
- Asus N75SF (Доживает свои дни на даче)
- HP Envy 13 (Текущая рабочая машинка)
- 3d-принтер Flying bear P902
- Паяльная станция Lukey 702. Только сейчас понял, что ей уже 15 лет. Ну и оловоотсос китайский в добавок.
- Осциллограф: Rigol DS1052E. До 100Мгц я его так и не разогнал, т.к. не было надобности.
- Камеры: Над осциллом дешевая китайская yoosee с PTZ. Включаем RTSP, режем доступ к облаку на роутере, профит. Еще по участку в роутеры на OpenWRT (их 4 штуки, между ними гигабит, роаминг через 802.11r) воткнуто несколько старых веб камер, отдающие поток через mjpeg-streamer. Недавно добыл для экспериментов две xiaomi dafang на которые ставится прошивка dafang-hacks. Пожалуй, на этом варианте и остановлюсь.
- Управляющие устройства для homeassistant: Тут сборная солянка. Часть - мои старые проекты на nrf24l01, часть на esp8266 с esphome (некоторые мои платы, некоторые готовые девайсы от sonoff перешитые esphome). Дополнительно по дому выключатели xiaomi aqara и некоторые датчики из этого комплекта, которые работают через zigbee2mqtt. Облака? Шпионаж? Нет, не слышали.
- Освещение: Из-за потолка под скатом крыши, поставил светодиодные ленты. Ими управляют мои самопальные модули, плавно зажигающие и гасящие их.
Софт:
- Octoprint (веб-интерфейс для 3д-принтера)
- cncjs (веб-интерфейс для станка с ЧПУ. Иногда приходится юзать bCNC, так как autolevel’инг в cncjs уже который год никак не допилят)
- shinobi (сервер видеонаблюдения. Пока только разворачиваю, думаю попробовать его сдружить с аппаратным m2m mfc на exynos в odroid-x2).
- wireguard - соединяет дом и дачу в одну локальную сеть. С тех пор, как провели оптику пинг от дачи до дома 4 мс.
- Steam - использую, чтобы иногда поиграться. Видеокарта стоит в сервере дома, на дачу идет стрим. Задержка 20-30мс, что вполне достаточно.
- Роутеры: Везде исключительно OpenWRT с типовой для меня конфигурацией.
- Homeassistant - собственно, пульт управления для умнодома.
- Chef - конфигурацию всех одноплатников под все задачи давно перестал делать руками, решил перейти на chef. Сейчас в процессе активного осваивания рубей и переписывания на нем всего и вся.
- Jenkins - по расписанию собирает ночью OpenWRT с типовой конфигурацией и деплоит на роутеры. Вот такие вот хардкорные обновления.
Собственно, смесь последних двух позволяет всей инфраструктуре жить практически на автопилоте, требуя минимум усилий на свое поддержание.
Самое главное, что есть - удаленное управление, которое позволяет отправить задачи на 3д-принтер/станок с чпу, что займут много времени и шума, а когда приедешь на дачу просто снимаешь готовый результат и не тратишь время.
>>> Просмотр (1920x2530, 1784 Kb)